03. 图的广度优先搜索知识
大约 7 分钟
图的广度优先搜索知识
1. 广度优先搜索简介
广度优先搜索算法(Breadth First Search):英文缩写为 BFS,又译作宽度优先搜索 / 横向优先搜索,是一种用于搜索树或图结构的算法。广度优先搜索算法从起始节点开始,逐层扩展,先访问离起始节点最近的节点,后访问离起始节点稍远的节点。以此类推,直到完成整个搜索过程。
因为遍历到的节点顺序符合「先进先出」的特点,所以广度优先搜索可以通过「队列」来实现。
2. 广度优先搜索算法步骤
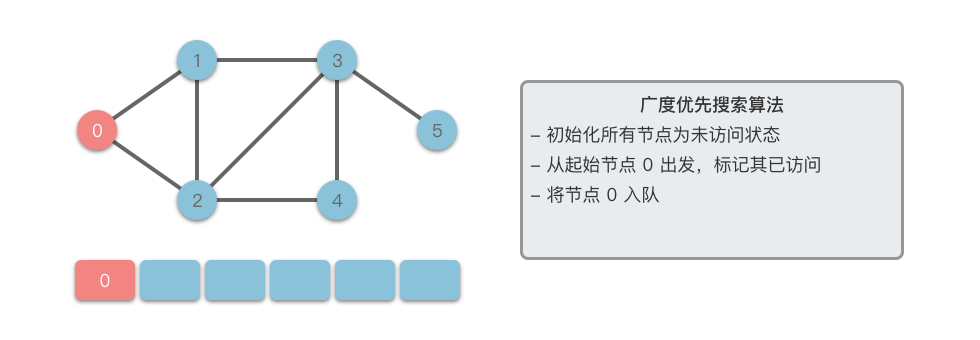
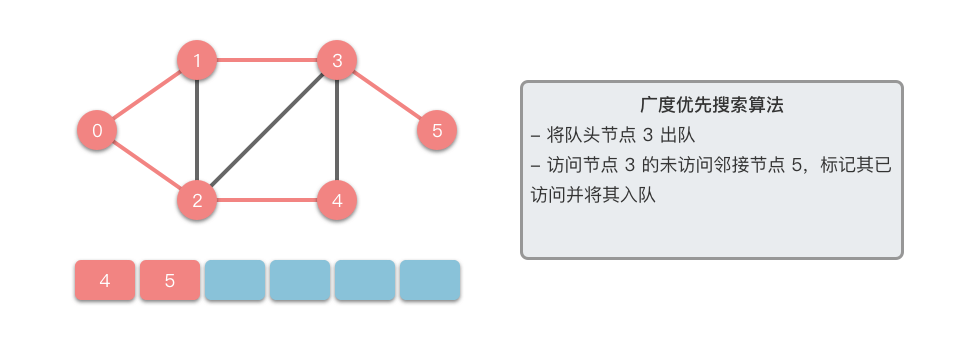
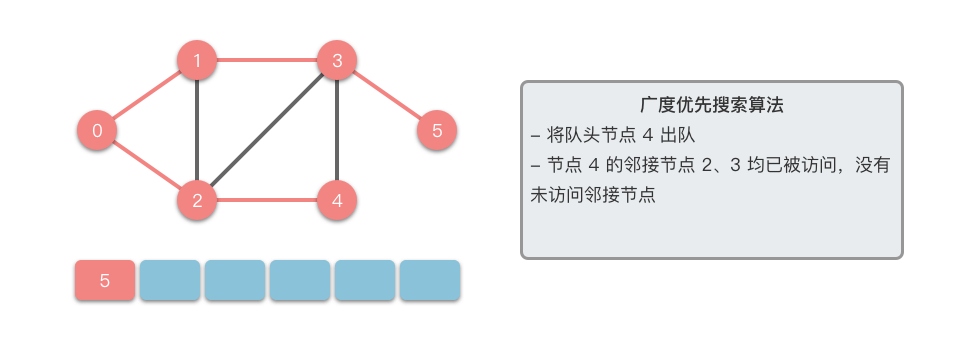
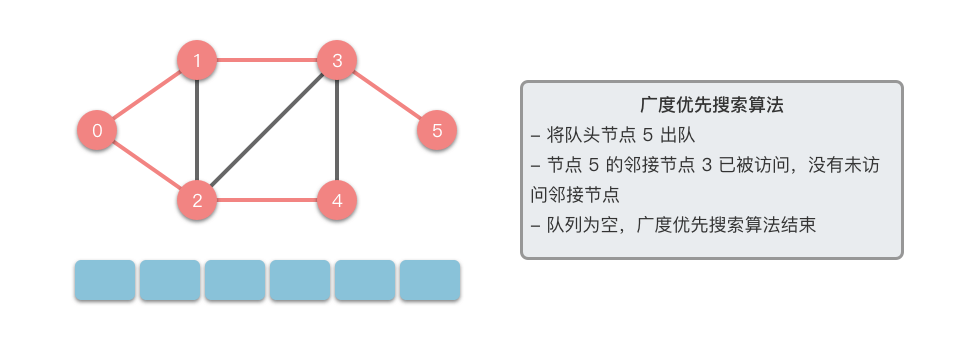
接下来我们以一个无向图为例,介绍一下广度优先搜索的算法步骤。
- 将起始节点 放入队列中,并标记为已访问。
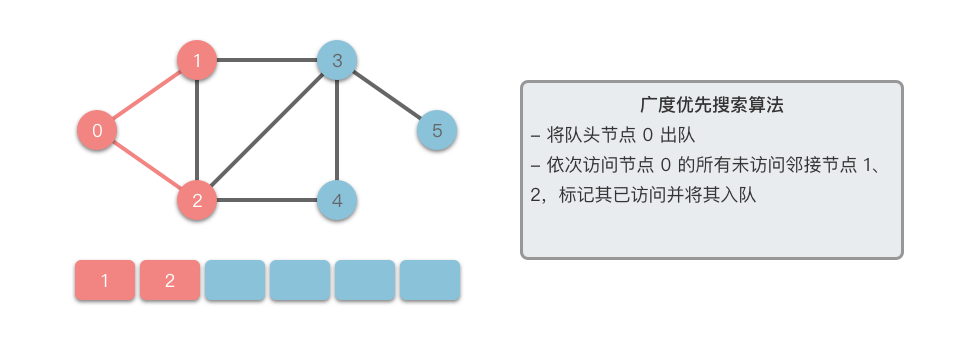
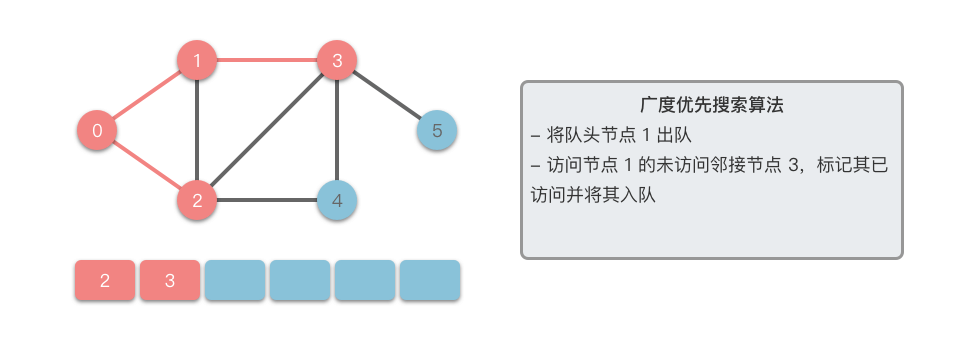
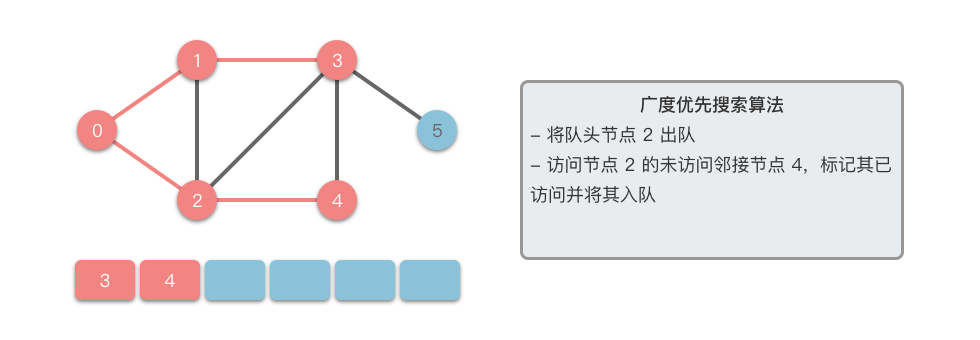
- 从队列中取出一个节点,访问它并将其所有的未访问邻接节点 放入队列中。
- 标记已访问的节点 ,以避免重复访问。
- 重复步骤 ,直到队列为空或找到目标节点。
<1>
<2>
<3>
<4>
<5>
<6>
<7>
3. 基于队列实现的广度优先搜索
3.1 基于队列实现的广度优先搜索算法步骤
- 定义 为存储无向图的嵌套数组变量, 为标记访问节点的集合变量, 为存放节点的队列, 为开始节点,定义
def bfs(graph, u):为队列实现的广度优先搜索方法。 - 首先将起始节点 标记为已访问,并将其加入队列中,即
visited.add(u),queue.append(u)。 - 从队列中取出队头节点 。访问节点 ,并对节点进行相关操作(看具体题目要求)。
- 遍历节点 的所有未访问邻接节点 (节点 不在 中)。
- 将节点 标记已访问,并加入队列中,即
visited.add(v),queue.append(v)。 - 重复步骤 ,直到队列 为空。
3.2 基于队列实现的广度优先搜索实现代码
import collections
class Solution:
def bfs(self, graph, u):
visited = set() # 使用 visited 标记访问过的节点
queue = collections.deque([]) # 使用 queue 存放临时节点
visited.add(u) # 将起始节点 u 标记为已访问
queue.append(u) # 将起始节点 u 加入队列中
while queue: # 队列不为空
u = queue.popleft() # 取出队头节点 u
print(u) # 访问节点 u
for v in graph[u]: # 遍历节点 u 的所有未访问邻接节点 v
if v not in visited: # 节点 v 未被访问
visited.add(v) # 将节点 v 标记为已访问
queue.append(v) # 将节点 v 加入队列中
graph = {
"0": ["1", "2"],
"1": ["0", "2", "3"],
"2": ["0", "1", "3", "4"],
"3": ["1", "2", "4", "5"],
"4": ["2", "3"],
"5": ["3", "6"],
"6": []
}
# 基于队列实现的广度优先搜索
Solution().bfs(graph, "0")
4. 广度优先搜索应用
4.1 克隆图
4.1.1 题目链接
4.1.2 题目大意
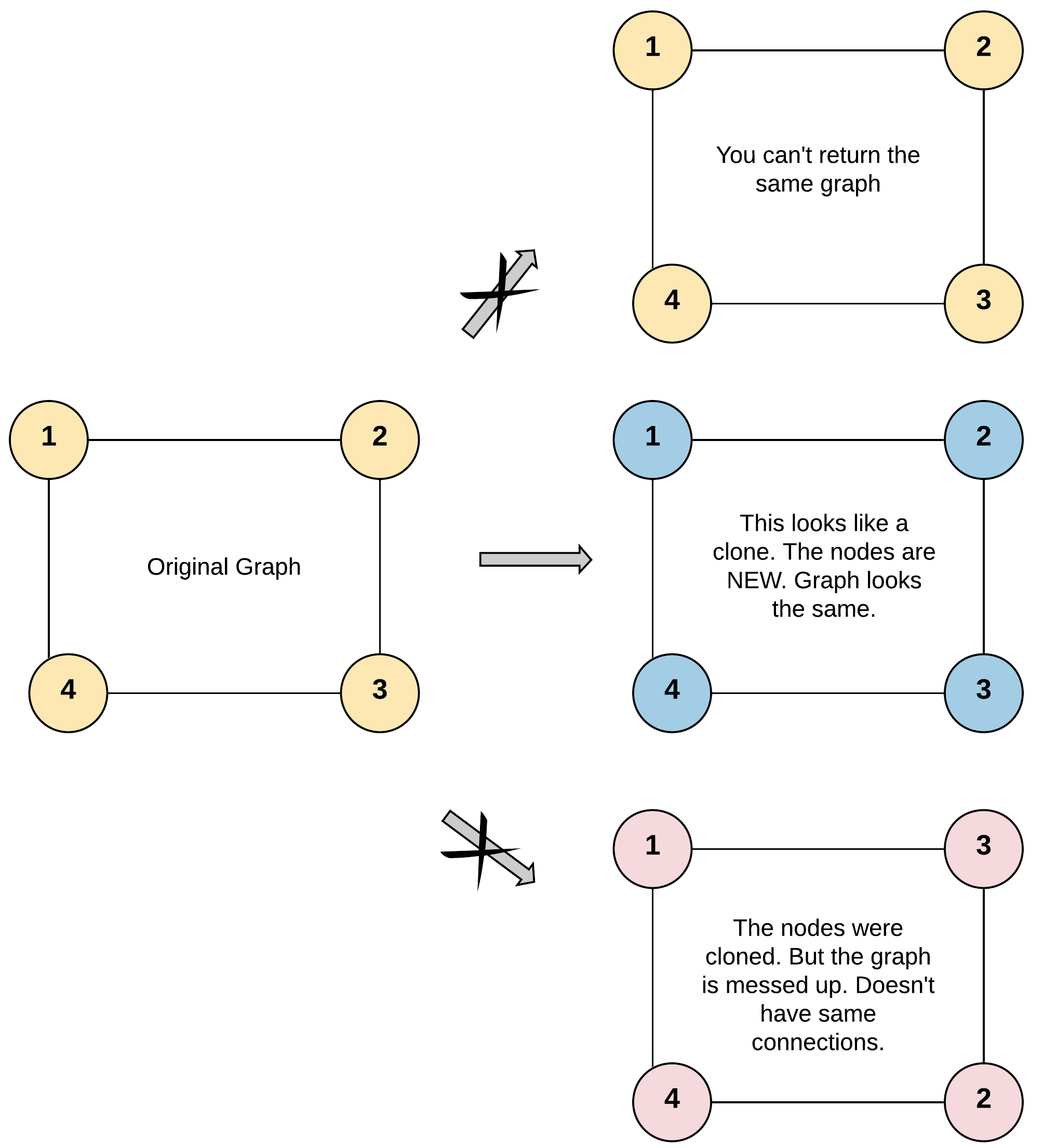
描述:以每个节点的邻接列表形式(二维列表)给定一个无向连通图,其中 表示值为 的节点的邻接列表, 表示值为 的节点与值为 的节点有一条边。
要求:返回该图的深拷贝。
说明:
- 节点数不超过 。
- 每个节点值 都是唯一的,。
- 无向图是一个简单图,这意味着图中没有重复的边,也没有自环。
- 由于图是无向的,如果节点 是节点 的邻居,那么节点 也必须是节点 的邻居。
- 图是连通图,你可以从给定节点访问到所有节点。
示例:
- 示例 1:
输入:adjList = [[2,4],[1,3],[2,4],[1,3]]
输出:[[2,4],[1,3],[2,4],[1,3]]
解释:
图中有 4 个节点。
节点 1 的值是 1,它有两个邻居:节点 2 和 4 。
节点 2 的值是 2,它有两个邻居:节点 1 和 3 。
节点 3 的值是 3,它有两个邻居:节点 2 和 4 。
节点 4 的值是 4,它有两个邻居:节点 1 和 3 。
- 示例 2:
输入:adjList = [[2],[1]]
输出:[[2],[1]]
4.1.3 解题思路
思路 1:广度优先搜索
- 使用哈希表 来存储原图中被访问过的节点和克隆图中对应节点,键值对为「原图被访问过的节点:克隆图中对应节点」。使用队列 存放节点。
- 根据起始节点 ,创建一个新的节点,并将其添加到哈希表 中,即
visited[node] = Node(node.val, [])。然后将起始节点放入队列中,即queue.append(node)。 - 从队列中取出第一个节点 。访问节点 。
- 遍历节点 的所有未访问邻接节点 (节点 不在 中)。
- 根据节点 创建一个新的节点,并将其添加到哈希表 中,即
visited[node_v] = Node(node_v.val, [])。 - 然后将节点 放入队列 中,即
queue.append(node_v)。 - 重复步骤 ,直到队列 为空。
- 广度优先搜索结束,返回起始节点的克隆节点(即 )。
思路 1:代码
class Solution:
def cloneGraph(self, node: 'Node') -> 'Node':
if not node:
return node
visited = dict()
queue = collections.deque()
visited[node] = Node(node.val, [])
queue.append(node)
while queue:
node_u = queue.popleft()
for node_v in node_u.neighbors:
if node_v not in visited:
visited[node_v] = Node(node_v.val, [])
queue.append(node_v)
visited[node_u].neighbors.append(visited[node_v])
return visited[node]
思路 1:复杂度分析
- 时间复杂度:。其中 为图中节点数量。
- 空间复杂度:。
4.2 岛屿的最大面积
4.2.1 题目链接
4.2.2 题目大意
描述:给定一个只包含 、 元素的二维数组, 代表岛屿, 代表水。一座岛的面积就是上下左右相邻的 所组成的连通块的数目。
要求:计算出最大的岛屿面积。
说明:
- 。
- 。
- 。
- 为 或 。
示例:
- 示例 1:
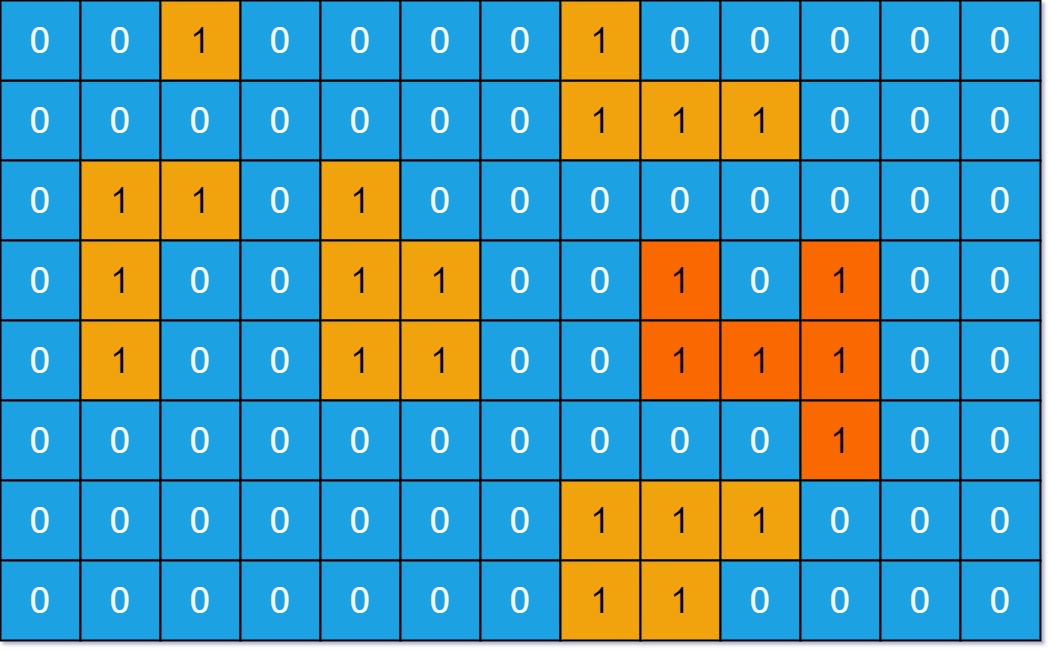
输入:grid = [[0,0,1,0,0,0,0,1,0,0,0,0,0],[0,0,0,0,0,0,0,1,1,1,0,0,0],[0,1,1,0,1,0,0,0,0,0,0,0,0],[0,1,0,0,1,1,0,0,1,0,1,0,0],[0,1,0,0,1,1,0,0,1,1,1,0,0],[0,0,0,0,0,0,0,0,0,0,1,0,0],[0,0,0,0,0,0,0,1,1,1,0,0,0],[0,0,0,0,0,0,0,1,1,0,0,0,0]]
输出:6
解释:答案不应该是 11 ,因为岛屿只能包含水平或垂直这四个方向上的 1 。
- 示例 2:
输入:grid = [[0,0,0,0,0,0,0,0]]
输出:0
4.2.3 解题思路
思路 1:广度优先搜索
- 使用 记录最大岛屿面积。
- 遍历二维数组的每一个元素,对于每个值为 的元素:
- 将该元素置为 。并使用队列 存储该节点位置。使用 记录当前岛屿面积。
- 然后从队列 中取出第一个节点位置 。遍历该节点位置上、下、左、右四个方向上的相邻节点。并将其置为 (避免重复搜索)。并将其加入到队列中。并累加当前岛屿面积,即
temp_ans += 1。 - 不断重复上一步骤,直到队列 为空。
- 更新当前最大岛屿面积,即
ans = max(ans, temp_ans)。
- 将 作为答案返回。
思路 1:代码
import collections
class Solution:
def maxAreaOfIsland(self, grid: List[List[int]]) -> int:
directs = [(0, 1), (0, -1), (1, 0), (-1, 0)]
rows, cols = len(grid), len(grid[0])
ans = 0
for i in range(rows):
for j in range(cols):
if grid[i][j] == 1:
grid[i][j] = 0
temp_ans = 1
queue = collections.deque([(i, j)])
while queue:
i, j = queue.popleft()
for direct in directs:
new_i = i + direct[0]
new_j = j + direct[1]
if new_i < 0 or new_i >= rows or new_j < 0 or new_j >= cols or grid[new_i][new_j] == 0:
continue
grid[new_i][new_j] = 0
queue.append((new_i, new_j))
temp_ans += 1
ans = max(ans, temp_ans)
return ans
思路 1:复杂度分析
- 时间复杂度:,其中 和 分别为行数和列数。
- 空间复杂度:。